
Stability Applied in the Design of Autonomous Underwater Vehicles
- UFRJ Nautilus
- May 7, 2020
- 2 min read
Updated: May 7, 2021
For many years, the great navigations played a fundamental role in the advance of civilizations. A powerful maritime fleet measured how hegemonic and influential a nation could be. Not unlike that time, the nautical sciences also important on our daily lives. The increasing technological development has reached the naval sector and has made it possible to develop highly complex projects, such as Autonomous Underwater Vehicles (AUVs). However, a common concern between us and the inventors behind sailing boats is the concept of Floatage.
It is essential to ensure that our robot remains in the water in a certain way so that it performs the tasks that it’s been assigned to, whether it’s in a competition or in the oil industry. In order to do that, we must concern to have full knowledge involving Mechanics and Hydrodynamics and Materials. With this in mind, how can we define floatage?
We can define it as the phenomenon resulting from the interaction between the displacement of water mass by the sub and the vehicle’s weight. If the displacement of water mass is lower than its weight, the body will sink. If it is the same as the weight or higher, it will float. As you can see, when building an AUV, we must choose the material we will use really carefully, considering factors such as strength and density.
One of the most important applications of floatage in vessels in general is to use it in order to get stability on the vehicle. According to Archimedes Principle (288 BC - 212BC), when a body is immersed in a certain fluid, it will suffer an upward vertical force, known as buoyancy. Such force, when combined with the weight acting on the gravity center of the body, can result on stable or unstable dynamics.
In order to determine the type of movement that will be carried out, it is important to consider the Center of Carena, which is the Gravity Center of the volume of water displaced, the buoyant force acts on it. The Center of Carena is located on the same line of symmetry of the body’s gravity center. For this reason, when there is a lateral displacement of the body, it is important that the center of carena is located above the center of gravity, generating torque on the opposite direction of the movement, which maintains the tendency of balance.
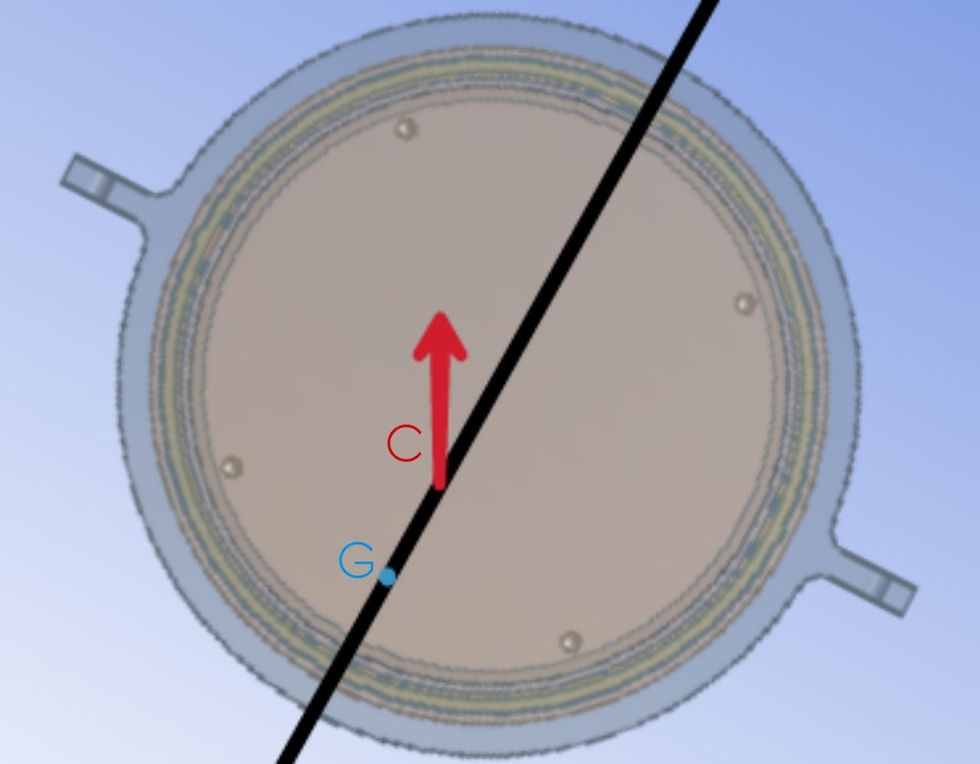
G = Gravity Center; C = Center of Carena
The concepts presented are of great importance for the development of the robot’s mechanics systems. Taking into account the idea of floatage and RoboSub® rules, it is important that our AUV has at least 0.5% positive buoyancy, that is, that 50% of the AUV is submerged.
Having a stable vehicle, on the other hand, is a facilitating agent for the software responsible for controlling our autonomous submarine. It makes the PID (a control technique that consists of minimizing the error of a signal by proportional, integrative and derivative action) less complicated, saving computational power and time.

With the pitch as close to zero as possible, the PID controller of this degree of freedom can be neglected. It is important to note that in order to move along the X axis, a zero pitch value is required.
Written by Lara Figueiredo, Ramon Christian e Vinicius Feijó
Comments