
BrHue

 |  |  |  |
|---|
UM AUV VERDADEIRAMENTE BRASILEIRO



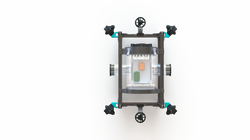
PARTE INTERNA
A parte interna é onde se organizam os componentes eletrônicos dentro do AUV. Localizam-se dentro do Main-Hull (cilindro de acrílico principal).
ANEXO DA BATERIA
É um tubo de acrílico que é anexado na parte superior do frame e que contém a bateria e a placa PCM, que garante a segurança da bateria caso haja algum problema, interrompendo sua alimentação.



KILL SWITCH
Kill switch é o componente responsável pelo desligamento do sistema principal do AUV, para caso haja uma emergência, seja possível os desligar de forma manual, a partir de um interruptor e com isso preservar a parte interna do robô.
FEA - PERFIL DE ALUMÍNIO

Simulação FEA, utilizando o software Ansys, com o objetivo de analisar a deformação máxima sofrida pelos perfis de alumínio do frame quando submetidos a diferentes forças
FLUIDODINÂMICA COMPUTACIONAL

Eletrônica



PLACA DOS MOTORES
Placa responsável pelo controle dos motores. Ela é conectada aos ESCs (Electronic Speed controller) e os ESCs recebem o sinal PWM vinda do microcontrolador Tensy.

PLACA DOS SENSORES
Nessa placa é conectada a fonte do BRHue, com saídas de 12V, 5V e 3,3V que alimenta todo o sistema eletrônico interno. É conectado também o sensor de pressão e profundidade externo e seus dados são armazenados no Teensy.
Software
SIMULAÇÃO DA PISCINA EEFD
A fim de criar um ambiente virtual semelhante ao ambiente real onde testamos o robô, uma réplica da piscina da Escola de Educação Física e Desportos (EEFD) de nossa universidade foi criada no software de modelagem Blender, e então exportada para o Gazebo, onde são realizadas as simulações com o AUV.





SIMULAÇÃO DA PISCINA DA ROBOSUB
Além da simulação da piscina da EEFD, também foi feita uma réplica da piscina principal onde acontece a competição. A simulação também conta com muitos dos obstáculos presentes na competição, como o portão, bóias, “dropper” e outros.
Os arquivos que inicializam a simulação também carregam o modelo do nosso robô e diversos dos seus recursos e parâmetros. Foram criados arquivos diferentes para que apenas algumas das funcionalidades do AUV fossem testadas de cada vez, mas também existe um que faz uso de todos os seus atributos.
SLAM
SLAM é um acrônimo para Simultaneous Localization and Mapping. É basicamente um problema computacional que consiste em gerar uma mensagem de odometria com o uso de câmeras. Como é um problema, várias respostas podem ser formuladas. Em nosso caso, usamos a abordagem chamada RTAB-Map (Real-Time Appearance-Based Mapping). Em resumo, o algoritmo tenta mesclar as informações da(s) câmera(s) para criar um mapa de profundidade em tempo real.
Logo, este, primeiramente, é criado sem muita precisão. No entanto, a beleza do sistema é exposta após um loop do sistema. De uma forma simplista, quando as imagens das câmeras se assemelham com as recebidas em algum momento passado, uma fusão é proposta dentro do algoritmo, a qual determinará se a posição dos obstáculos ou do robô será atualizada ou não, o que habilita um escalonamento para a geração de mensagens de posição cada vez mais precisas, conforme a exposição ao ambiente.
