
BrHue

 |  |  |  |
|---|
A Truly Brazilian AUV



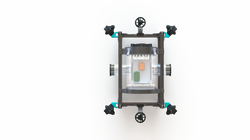
INTERIOR
The interior is where the electronics inside the AUV are organized. They are located inside the Main-Hull (main acrylic cylinder)
BATTERY ATTACHMENT
It is an acrylic tube that is attached to the top of the frame and contains the battery and the PCM board, which guarantees the safety of the battery in case there is any problem, interrupting its power supply.



KILL SWITCH
Kill switch is the component responsible for the shutdown of the main system of the AUV. In case there is an emergency, it is possible to turn them off manually, using a switch and thus preserve the internal part of the robot.
FEA - ALUMINUM PROFILE

FEA simulation, using Ansys software, in order to analyze the maximum deformation suffered by the frame's aluminum profiles when subjected to different forces.
COMPUTATIONAL FLUID DYNAMICS

Electronics



MOTOR PCB
The board responsible for controlling the motors. It is connected to the ESCs (Electronic Speed controller) and the ESCs receive the PWM signal from the Tensy microcontroller.

SENSORS PCB
The BRHue source is connected to this board, with 12V, 5V, and 3.3V outputs, which powers the entire internal electronics system. The external pressure and depth sensor is also connected and its data is stored in a Teensy.
Software
EEFD POOL
With the goal of creating a virtual environment similar to the real one where we test the robot, a replica of the pool in the Sports and Physical Education School (EEFD, in Portuguese) from our university was created in the 3D modeling software Blender, and then exported to Gazebo, where all the simulations with the AUV are done.





TRANSDECK POOL
Besides the EEFD pool, a replica of the main pool where the competition takes place was also created. This simulation has many of the obstacles and tasks in the competition, such as the gate, buoys, the dropper and others.
The files that launch the simulation also load the model of the robot and many of its resources and parameters. Different launch files were created so that each of the AUV’s functionalities could be tested individually, but there is a file that launches all of its features as well.
SLAM
SLAM is an acronym for Simultaneous Localization and Mapping. It is basically a computational problem that consists in generating an odometry message through the use of cameras. As with many problems, there are a wide number of solutions for this issue. In our case, we use an approach called RTAB-Map (Real-Time Appearance-Based Mapping). In summary, this algorithm tries to merge the information of the cameras in the robot to create a real time depth map.
Initial versions of this map aren’t very precise. However, the beauty of this system lies in what it can do after some iterations of the loop in the program. In a simplistic fashion, when the images from the cameras are similar to one received in the past, a fusion of these data is made in the algorithm, which will update the robot’s or obstacle position, allowing the generation of odometry messages more and more precisely, according to the exposure to the environment.
